During the summer of 2014 I was was hired as an intern at Johnson Space Center, Houston, Texas to help develop a SLAM driven robot using the recently developed Modular Integrated Stack-able Layers (MISL) system and a Lidar system to detect the environment.
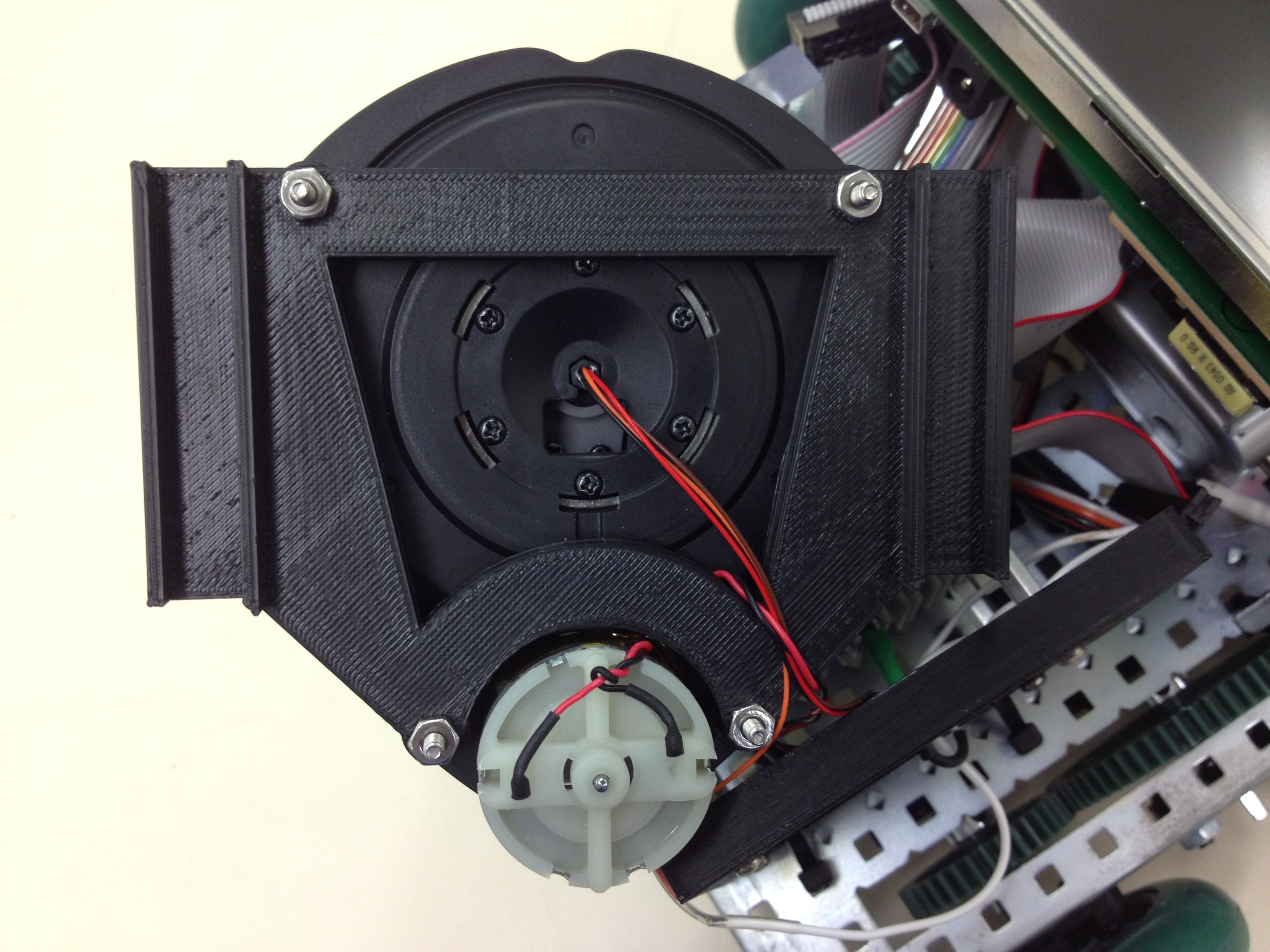
We decided that the modular Lidar system from the Neeto vacuum cleaner would be a good choice to use. This unit spins, taking a distance reading every degree and outputting the data continuously over a 8n1, 115200bd TTL communication line.
The MISL system is purpose built boards that can be stacked together and share a common bus in a small form factor. This bridges the gap between general purpose systems like the Raspberry Pi or teensy micro-controller and purpose built systems that would have little use outside its intended purpose.
An output screen was also included to aid in understanding how the software saw the information. This was later upgraded to a larger screen for additional detail and a slightly better refresh rate.


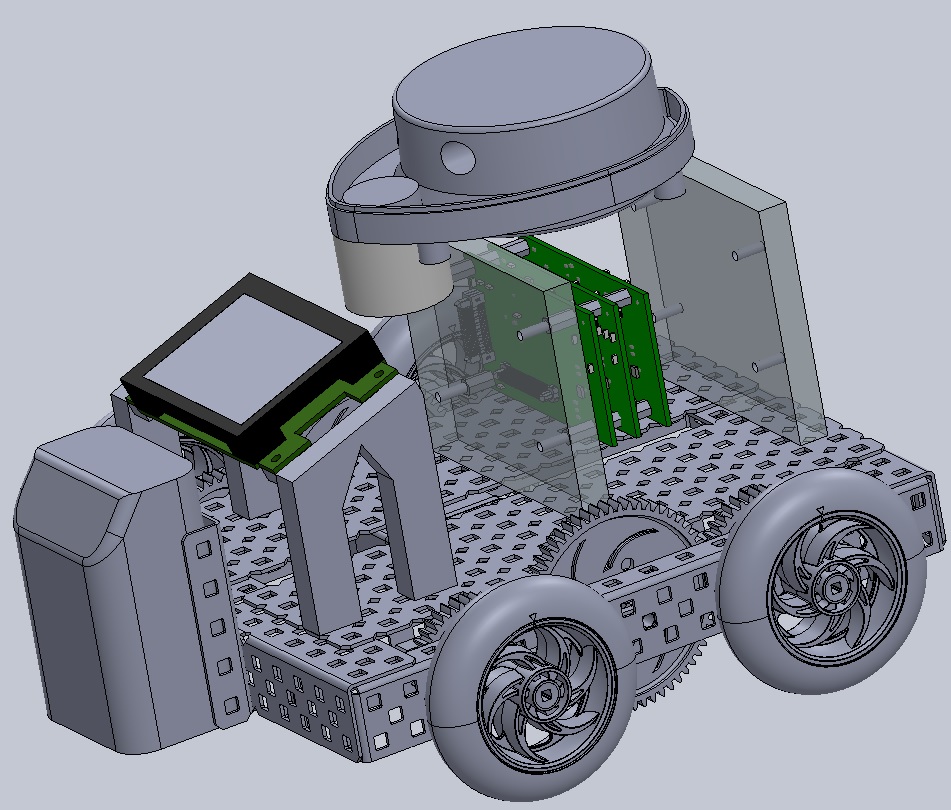
The software used to develop the code was Texas Instrument’s Code Composer IDE. The software for modeling the hardware was Solid-works. Lastly the structural material for the robot was a made mostly from Vex kits and 3d printed parts.
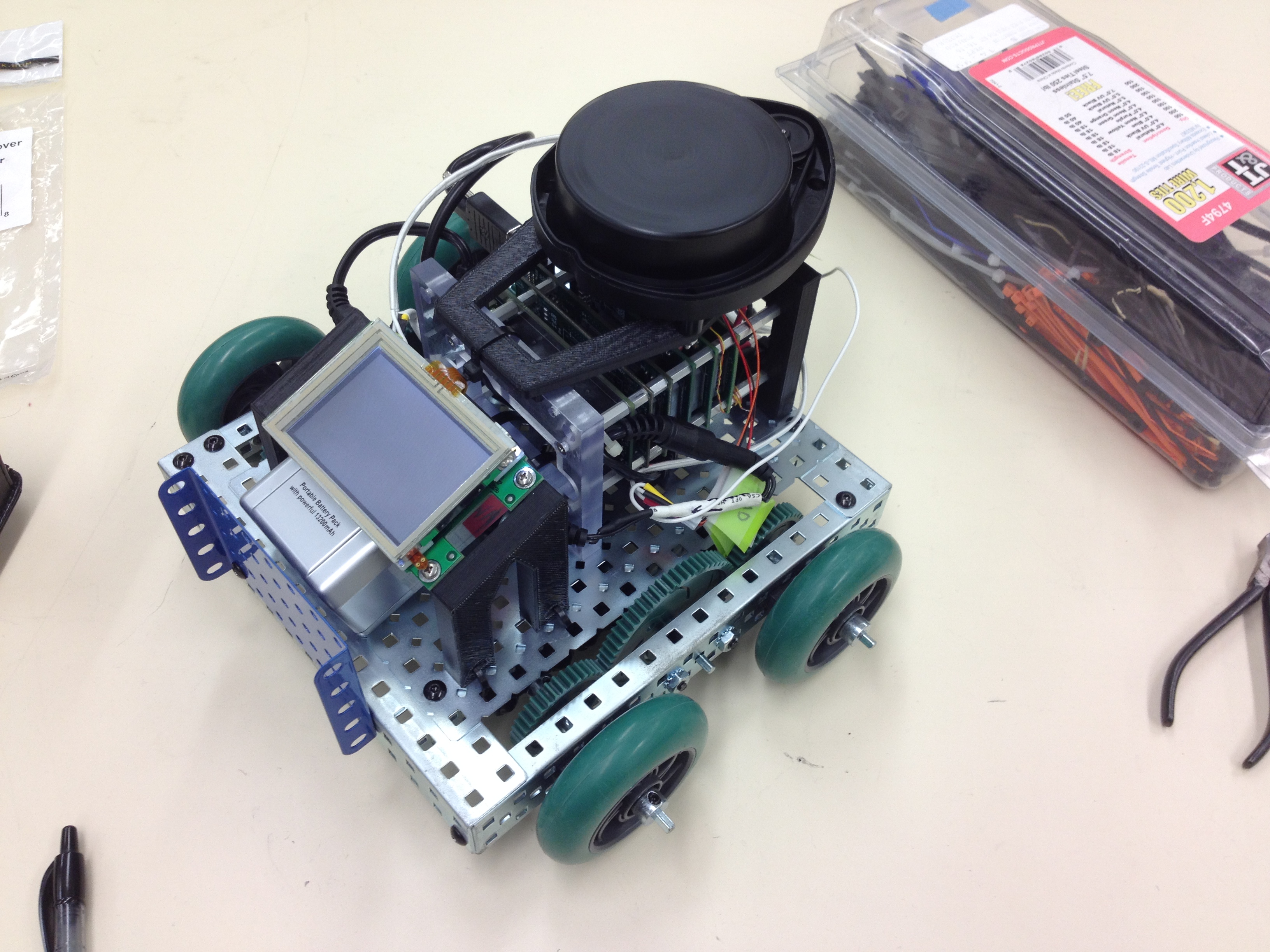
This is the final result of the project. I would have liked to get the SLAM algorithm working on the system, but time had run out and it was time to head home.

When I returned home I started designing and building a bit of an upgrade to the lidar module as a personal project.